
�����P���ڙC���ˣ����Ƹ������ߡ���Ԫ�ڡ��ж��y��
�r�g��2024-12-23 16:22:00���ߣ�LeeZhou��Դ���¸ߝ��坍�O(sh��)����������QQ���g�������vӍ�����˾W(w��ng)��
���������a(ch��n)�\���^���������w��(n��i)��ڕ��ܵ����h(hu��n)�����L(f��ng)ˮ�Օ���՚����g���Ķ���(d��o)������ڸ��g�F(xi��n)��Įa(ch��n)�����S���r�g�����������ޱ��w�������ϻ���(y��n)�أ��ƓpÓ��F(xi��n)�������������ӄ��˹��w�Ĵ�ⸯ�g�������˃��ęCе���ȺͰ�ȫ���ܣ������Ҫ�����ޱ����M�з������P�ه�Ϳʩ����
��(d��ng)ǰ�ڃ��������Pʩ�������ИI(y��)��(n��i)��u�������ڙC���˴����˹��߿����I(y��)����߾S�o�ˆT��Σ�U�h(hu��n)�������I(y��)�İ�ȫ�����������I(y��)�L(f��ng)�U����߹���Ч�ʣ��������@���Ľ�(j��ng)��Ч������Ч���������P����ʩ����u�M�����ܻ����Cе���r���������P���ڙC������u���ИI(y��)��(n��i)�P(gu��n)ע �����@������ζ������“��Ԫ��”����˺��� ��

���ڃ��ތ��ڴ����o���O(sh��)�䣬���ޱ��湤���h(hu��n)����(f��)�s �����ڙC������Ҫ���d���P��ϴ�b�� ���ڃ��ޱ����M�г��P���I(y��) ����(y��ng)���c���ߴ硢�Π� ������l���Ȇ��}���C������Ҫ����Ƅӡ�������ؓ(f��)�d��Խ�ϵȆ��}����������ڙC�����ܷ�ȫ��(w��n)������ɸ߿����I(y��)�������������������������P(gu��n)�I���g(sh��)��
�F(xi��n)�е����ڙC�������������c������φ��}�����ڙC�����ڹ��w�������»��ӣ���(w��n)���Ե������ܳ��d�����d�������ȱ�����ˣ����ڙC�������댍�F(xi��n)�˹����Ԅӻ��Cеʩ���D(zhu��n)׃����횴������ڙC���˸������ߵļ��g(sh��)�ډ���
���ڙC���˵���Ҫ������ʽ������ؓ(f��)����������������������������w����������ճ�������ͷ����W(xu��)����������������ʽ�m���ڌ�(d��o)���Բ��Ϙ�(g��u)�ɵı������ڱ��C�������x��ǰ���£��ܮa(ch��n)���h(yu��n)������������ʽ�������������ܵ�����ȱ�ݵ�Ӱ��^�������V����(y��ng)���ڃ����P�����I(l��ng)��
������ʽ���ڙC������������Դ�ɷ֞�늴�ʽ������ʽ�ɷN��늴�ʽ���ڙC�����������{(di��o)��(ji��)������ͻȻ��늻�������㌢��ɴ��������pС���M���������l(f��)�C���ˉ����¹ʣ�����ʽ���ڙC���˵����������ܔ��Ӱ� ������������С���������xӰ��Ҿ��x���������{(di��o)��(ji��) ��Ŀǰ��������̓��ij��P���ڙC���� ��������ʽ��Ҫ���������������g(sh��) ��
�ɲ�����������+�Ď�ʽ���ߙC��(g��u)���������F�Ƕ���Ď��ϣ�Ȼ���Ď����ߙC��(g��u)�������D(zhu��n)���y�}���Ϗ�(f��)�s�ޱڗl�� ��ʹ��ԓ�N��ʽ��(y��ng)��ʮ�����y ����Ҫ���^����(q��)���������������C��(g��u)�c�ƄәC��(g��u)����� ���������y���{(di��o)��(ji��)�Ȇ��} ��
���ڴˣ��¸ߝ������аl(f��)��Ͷ��ʹ����һ��݆ʽ���������ڙC���� ���C���˸������������� �����������ڴ��w�����M�����I(y��)�����߂�һ��������Խ������ ���ɑ�(y��ng)�����ޱ��溸�p ������ƽ��r���������(q��)ԽҰ�ױP݆ʽ�(q��)�� �����ϙC�����\�еķ�(w��n)���� ���ɳ���200kgؓ(f��)�d���܉���280MPa��ˮ���_�������M�з������Pʩ�� ��
�¸ߝ������������P�C���� �����d���P��ϴ�����I(y��)�����ߙC��(g��u) �����ڙC��(g��u) �������b�á����ϵ�y(t��ng)�Լ����ܻ�����ϵ�y(t��ng)�O(sh��)Ӌ��һ�w�����ó��߉�ˮ�������P���܉��Ч�ʸ��|(zh��)����������I(y��)������Ч�ʿ��_(d��)��70 m²/h�����P�ȼ����_(d��)Sa2.5��������ճ��Ż����b���������P��ϴ��ďUˮ�������M�л��������ژO���������������M���坍�������m���ڴ��̓����P�S�o������
�¸ߝ���2015���۽����ܻ�����(sh��)�ػ����C���˻����I(y��)��ϴ���g(sh��)���о������g�����аl(f��)��Ͷ���Ј�һϵ�ЙC���ˣ��߉�ˮ���P���ڙC�������������������ڙC���ˡ��ܵ����p��ĥ�C�������ԄӇ�Ϳ���ڙC��������ɰ���ڙC���˵ȣ������ͽ��ٱ����M���Ԅӻ���ɰ�����P����ϴ����Ϳ�ȣ���ʯ����������������ИI(y��)�õ��ˏV���đ�(y��ng)�á��¸ߝ��ɞ��Ñ��ṩ�Ԅӻ��C�����O(sh��)��+���I(y��)ʩ���F����ṩ��������Ԅӻ����P����ϴ����Ϳʩ������(w��)������������gӭ�Ԓ(li��n)ϵ ���¸ߝ������\��������(w��)��
��һƪ�����ڙC���ˣ��������P��Ϳ����ʩ���r�����¼��g(sh��)
��һƪ�� ���·��� ��������(zh��n)��" target="_blank">���w����C����ʩ�����¼��g(sh��) ���·��� ��������(zh��n)��
���T������
������
Hot Products
���]��
Recent News
- ������
- ��˾��
- �ИI(y��)�ӑB(t��i)
- ���g(sh��)����
- �P(gu��n)���҂�
- ��I(y��)����
- (li��n)ϵ�҂�
- �P(gu��n)ע�҂�

����(w��)�ᾀ����һ������9:00~18:00��
010��64437473
Copyright © 2000-2020 �����¸ߝ��坍�O(sh��)������˾ All Rights Reserved ��ICP��11015544̖

�r�g��2024-12-23 16:22:00���ߣ�LeeZhou��Դ���¸ߝ��坍�O(sh��)����������QQ���g�������vӍ�����˾W(w��ng)��
���������a(ch��n)�\���^����
�����w��(n��i)��ڕ��ܵ����h(hu��n)�����L(f��ng)ˮ�Օ���՚����g
���Ķ���(d��o)������ڸ��g�F(xi��n)��Įa(ch��n)��
���S���r�g������
�����ޱ��w�������ϻ���(y��n)�أ��ƓpÓ��F(xi��n)����������
���ӄ��˹��w�Ĵ�ⸯ�g
�������˃��ęCе���ȺͰ�ȫ���ܣ������Ҫ�����ޱ����M�з������P�ه�Ϳʩ��
��
��(d��ng)ǰ�ڃ��������Pʩ����
��(d��ng)ǰ�ڃ��������Pʩ����
���ИI(y��)��(n��i)��u�������ڙC���˴����˹��߿����I(y��)����߾S�o�ˆT��Σ�U�h(hu��n)�������I(y��)�İ�ȫ��
���������I(y��)�L(f��ng)�U
����߹���Ч�ʣ��������@���Ľ�(j��ng)��Ч������Ч��
�������P����ʩ����u�M�����ܻ�
���Cе���r���������P���ڙC������u���ИI(y��)��(n��i)�P(gu��n)ע
�����@������ζ������“��Ԫ��”����˺���
��
���ڃ��ތ��ڴ����o���O(sh��)�䣬���ޱ��湤���h(hu��n)����(f��)�s
���ڃ��ތ��ڴ����o���O(sh��)�䣬���ޱ��湤���h(hu��n)����(f��)�s
�����ڙC������Ҫ���d���P��ϴ�b��
���ڃ��ޱ����M�г��P���I(y��)
����(y��ng)���c���ߴ硢�Π�
������l���Ȇ��}
���C������Ҫ����Ƅӡ�����
��ؓ(f��)�d
��Խ�ϵȆ��}�����
�����ڙC�����ܷ�ȫ��(w��n)������ɸ߿����I(y��)
�������������������������P(gu��n)�I���g(sh��)
��
�F(xi��n)�е����ڙC�������������c������φ��}
�F(xi��n)�е����ڙC�������������c������φ��}
�����ڙC�����ڹ��w�������»��ӣ���(w��n)���Ե�
�����ܳ��d�����d�������ȱ�
����ˣ����ڙC�������댍�F(xi��n)�˹����Ԅӻ��Cеʩ���D(zhu��n)׃
����횴������ڙC���˸������ߵļ��g(sh��)�ډ�
��
���ڙC���˵���Ҫ������ʽ������ؓ(f��)���������������
���ڙC���˵���Ҫ������ʽ������ؓ(f��)���������������
��������
�����w����������ճ�������ͷ����W(xu��)������
����������ʽ�m���ڌ�(d��o)���Բ��Ϙ�(g��u)�ɵı���
���ڱ��C�������x��ǰ���£��ܮa(ch��n)���h(yu��n)������������ʽ��������
�����ܵ�����ȱ�ݵ�Ӱ��^��
�����V����(y��ng)���ڃ����P�����I(l��ng)��
������ʽ���ڙC������������Դ�ɷ֞�늴�ʽ������ʽ�ɷN��늴�ʽ���ڙC�����������{(di��o)��(ji��)
������ʽ���ڙC������������Դ�ɷ֞�늴�ʽ������ʽ�ɷN��늴�ʽ���ڙC�����������{(di��o)��(ji��)
������ͻȻ��늻�������㌢��ɴ��������pС
���M���������l(f��)�C���ˉ����¹ʣ�����ʽ���ڙC���˵����������ܔ��Ӱ�
������������С���������xӰ��Ҿ��x���������{(di��o)��(ji��)
��Ŀǰ��������̓��ij��P���ڙC����
��������ʽ��Ҫ���������������g(sh��)
��
�ɲ�����������+�Ď�ʽ���ߙC��(g��u)���������F�Ƕ���Ď��ϣ�Ȼ���Ď����ߙC��(g��u)�������D(zhu��n)���y�}���Ϗ�(f��)�s�ޱڗl��
�ɲ�����������+�Ď�ʽ���ߙC��(g��u)���������F�Ƕ���Ď��ϣ�Ȼ���Ď����ߙC��(g��u)�������D(zhu��n)���y�}���Ϗ�(f��)�s�ޱڗl��
��ʹ��ԓ�N��ʽ��(y��ng)��ʮ�����y
����Ҫ���^����(q��)���������������C��(g��u)�c�ƄәC��(g��u)�����
���������y���{(di��o)��(ji��)�Ȇ��}
��
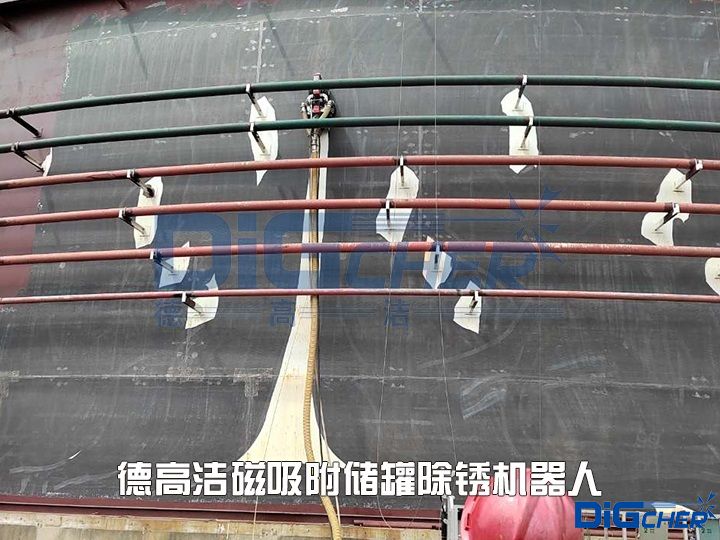
���ڴˣ��¸ߝ������аl(f��)��Ͷ��ʹ����һ��݆ʽ���������ڙC����
���ڴˣ��¸ߝ������аl(f��)��Ͷ��ʹ����һ��݆ʽ���������ڙC����
���C���˸�������������
�����������ڴ��w�����M�����I(y��)�����߂�һ��������Խ������
���ɑ�(y��ng)�����ޱ��溸�p
������ƽ��r���������(q��)ԽҰ�ױP݆ʽ�(q��)��
�����ϙC�����\�еķ�(w��n)����
���ɳ���200kgؓ(f��)�d���܉���280MPa��ˮ���_�������M�з������Pʩ��
��
�¸ߝ������������P�C����
�¸ߝ������������P�C����
�����d���P��ϴ�����I(y��)�����ߙC��(g��u)
�����ڙC��(g��u)
�������b�á����ϵ�y(t��ng)�Լ����ܻ�����ϵ�y(t��ng)�O(sh��)Ӌ��һ�w
�����ó��߉�ˮ�������P
���܉��Ч�ʸ��|(zh��)����������I(y��)
������Ч�ʿ��_(d��)��70 m²/h
�����P�ȼ����_(d��)Sa2.5��������ճ��Ż����b��
�������P��ϴ��ďUˮ�������M�л��������ژO���������������M���坍�������m���ڴ��̓����P�S�o������
�¸ߝ���2015���۽����ܻ�����(sh��)�ػ����C���˻����I(y��)��ϴ���g(sh��)���о������g�����аl(f��)��Ͷ���Ј�һϵ�ЙC���ˣ��߉�ˮ���P���ڙC�������������������ڙC���ˡ��ܵ����p��ĥ�C�������ԄӇ�Ϳ���ڙC��������ɰ���ڙC���˵ȣ������ͽ��ٱ����M���Ԅӻ���ɰ�����P����ϴ����Ϳ�ȣ���ʯ����������������ИI(y��)�õ��ˏV���đ�(y��ng)�á��¸ߝ��ɞ��Ñ��ṩ�Ԅӻ��C�����O(sh��)��+���I(y��)ʩ���F����ṩ��������Ԅӻ����P����ϴ����Ϳʩ������(w��)������������gӭ�Ԓ(li��n)ϵ
�¸ߝ���2015���۽����ܻ�����(sh��)�ػ����C���˻����I(y��)��ϴ���g(sh��)���о������g�����аl(f��)��Ͷ���Ј�һϵ�ЙC���ˣ��߉�ˮ���P���ڙC�������������������ڙC���ˡ��ܵ����p��ĥ�C�������ԄӇ�Ϳ���ڙC��������ɰ���ڙC���˵ȣ������ͽ��ٱ����M���Ԅӻ���ɰ�����P����ϴ����Ϳ�ȣ���ʯ����������������ИI(y��)�õ��ˏV���đ�(y��ng)�á��¸ߝ��ɞ��Ñ��ṩ�Ԅӻ��C�����O(sh��)��+���I(y��)ʩ���F����ṩ��������Ԅӻ����P����ϴ����Ϳʩ������(w��)������������gӭ�Ԓ(li��n)ϵ
���¸ߝ������\��������(w��)��
��һƪ�����ڙC���ˣ��������P��Ϳ����ʩ���r�����¼��g(sh��)
���T������
��һƪ�� ���·��� ��������(zh��n)��" target="_blank">���w����C����ʩ�����¼��g(sh��)
���·���
��������(zh��n)��
������
Hot Products
���]��
Recent News
- ������
- ��˾��
- �ИI(y��)�ӑB(t��i)
- ���g(sh��)����
- �P(gu��n)���҂�
- ��I(y��)����
- (li��n)ϵ�҂�
- �P(gu��n)ע�҂�
����(w��)�ᾀ����һ������9:00~18:00��
010��64437473
Copyright © 2000-2020 �����¸ߝ��坍�O(sh��)������˾ All Rights Reserved ��ICP��11015544̖